Vad är maskinseende och hur viktigt är det för självkörande bilar?
Key Takeaways
Självkörande fordon använder avancerad visuell perception för att förstå sin omgivning, så att de kan urskilja hinder, känna igen skyltar och färdas säkert längs vägar med hjälp av maskinseende teknik.
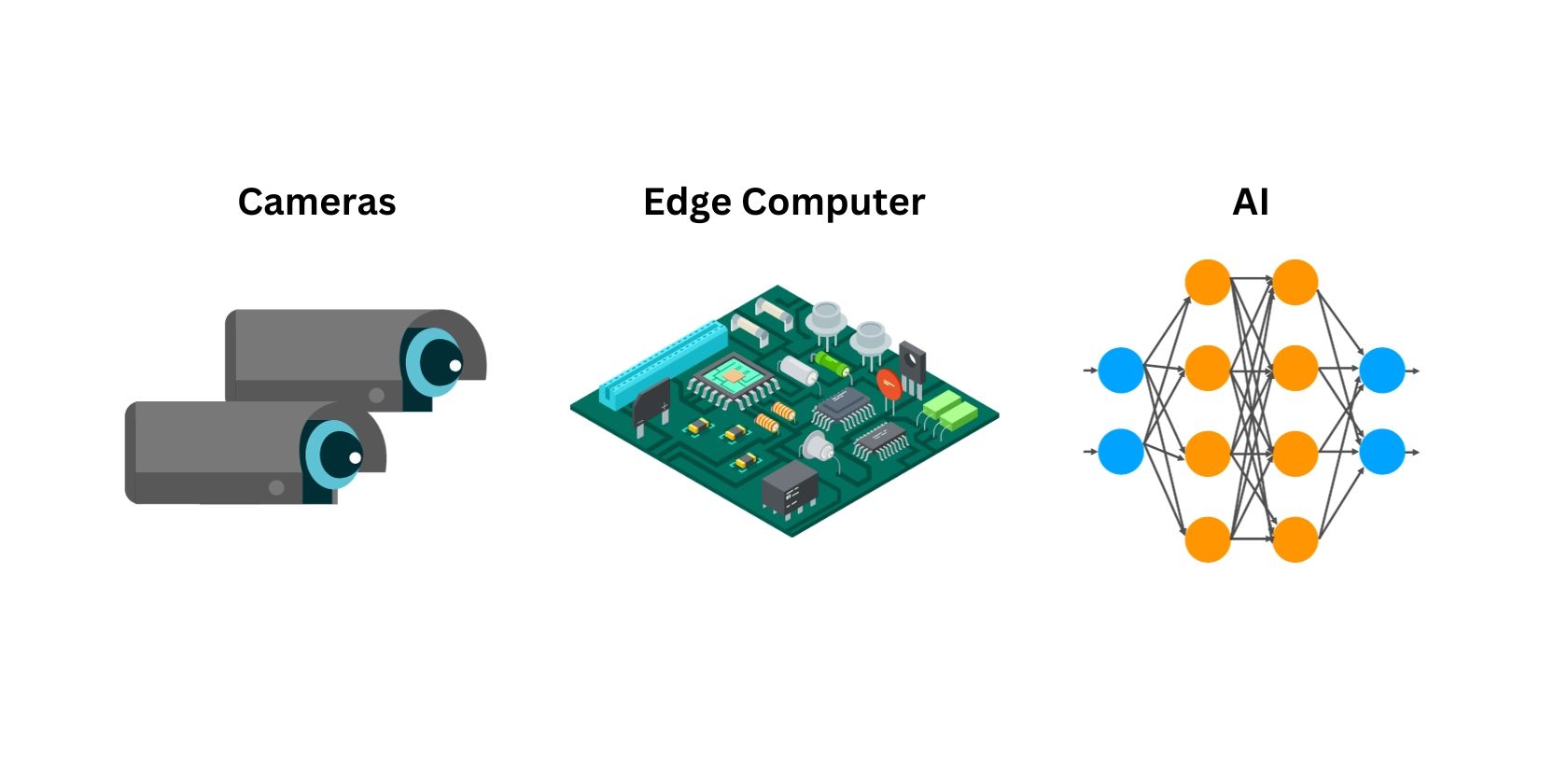
Maskinseende som används av autonoma fordon använder en kombination av kameror, edge computing och artificiell intelligens för att samla in visuella data, analysera dem direkt och känna igen former och enheter i miljön.
Framsteg inom artificiell intelligens, edge computing och kamerateknik är avgörande för att uppnå full autonomi i självkörande bilar genom maskinseende. Denna förmåga möjliggör klassificering av objekt, detektering av körfält och signaler, identifiering av skyltar och igenkänning av trafikmönster.
Konceptet med självkörande fordon har väckt stort intresse över tid. Trots att vi för närvarande kanske inte har helt autonoma bilar är moderna fordon utrustade med avancerade förarassistanssystem (ADAS), som kan utföra funktioner som automatisk styrning, korrigering av filavvikelser, parkering och adaptiv hastighetsreglering som svar på rådande trafikförhållanden.
Ett självkörande fordon är beroende av en mängd olika sensorer för att fungera effektivt som ett avancerat förarassistanssystem (ADAS). Maskinseende är den dominerande metoden för att uppfatta, känna igen och bestämma position och sammanhang för olika element i miljön. Om maskinseende saknas skulle autonoma fordon utrustade med endast farthållare och autopilot vara högst osannolika.
Vad är maskinseende?

Machine vision, även känt som bildbehandling med artificiell intelligens, avser maskiners förmåga att tolka visuell information från sin omgivning genom att känna igen och identifiera specifika objekt eller mönster. Denna teknik har många industriella tillämpningar för användning i automationssystem som robotteknik och självkörande fordon, där den gör det möjligt för dessa maskiner att uppfatta och navigera i sina miljöer genom datoralgoritmer som är utformade för att efterlikna mänsklig syn.
I dagsläget är maskinseende starkt beroende av tekniker för artificiell intelligens, särskilt de som härrör från djupinlärningsarkitekturer som konvolutionella neurala nätverk (CNN). Dessa avancerade algoritmer gör det möjligt att utveckla mycket motståndskraftiga och universellt tillämpliga modeller som kan urskilja objekt med stor noggrannhet i en mängd olika operativa scenarier.Därför används dessa system i allt större utsträckning för krävande tillämpningar inom allt från tillverkning och jordbruk till robotteknik och självkörande fordon, där tillförlitlig prestanda är av största vikt.
Hur fungerar maskinseende i självkörande bilar?
kameraarrangemanget, databehandlingen (som sker vid kanten) och algoritmer för artificiell intelligens. Dessa element underlättar driften av en autonom bil genom att göra det möjligt för den att uppfatta sin omgivning, fatta välgrundade beslut baserat på denna information och skilja mellan olika objekt och potentiella faror som finns längs dess väg. För att förstå hur dessa tekniska aspekter samverkar för att skapa ett sammanhängande system för maskinseende för en självkörande bil, ska vi titta närmare på varje komponent i detalj.
Kamerasystem
Maskinseende använder kamerasystem för att samla in visuella data om den omgivande miljön. Autonoma fordon använder flera kameror som är placerade runt fordonet för att samla in en omfattande mängd visuell information för förbättrad situationsmedvetenhet och beslutsfattande.
Komplementär metalloxidhalvledare (CMOS) och laddningskopplad enhet (CCD). I samband med autonoma fordon är CMOS ofta att föredra på grund av dess snabba avläsningshastighet, robusta inbyggda elektronik och parallella bearbetningskapacitet, vilket gör det till ett mer ändamålsenligt alternativ trots att det är känsligt för brus eller distorsioner. Olika strategier kan dock användas för att mildra dessa problem, inklusive justerbara belysningsinställningar, digitala nattbilder och bildfiltreringstekniker som förbättrar CMOS-sensorns prestanda under suboptimala ljusscenarier.
Stereoskopiskt seende, som är resultatet av en kombination av flera synintryck, ger en uppfattning om djup eller tredimensionalitet hos objekt och den omgivande miljön. För att uppnå detta för autonoma fordon är kamerorna strategiskt placerade med specifika intervall, så att de kan beräkna det närmaste avståndet mellan ett objekt och fordonet genom trilateration.
Stereopsis, eller förmågan att uppfatta djup genom binokulär syn, är en värdefull fördel som människor har tack vare att de har två ögon. Detta fenomen kan verifieras experimentellt genom att man blundar med ena ögat och väljer ett litet föremål på sin arbetsyta. Genom att placera handen längs föremålets periferi och samtidigt se till att dess yttersta del befinner sig minst fem centimeter bort, kan en person försöka uppskatta avståndet genom att hålla blicken fixerad under några ögonblick.Om man sedan öppnar båda ögonen igen kommer man att upptäcka en avsevärt ökad förmåga att uppfatta rumsliga relationer, ett resultat som kan hänföras till den förbättrade stereoskopiska synskärpa som erhållits på detta sätt.
Edge Computer
Den inbyggda datorn, som utnyttjar edge processing-kapacitet, uppdaterar omedelbart det självkörande fordonets system med realtidsinformation som samlats in av kamerasystemet. Trots de potentiella kostnadsbesparingar som är förknippade med molnberäkning för standardtillämpningar för maskinseende, kräver de inneboende riskerna med att ansluta självkörande fordon till internet alternativa lösningar.
Att använda ett distribuerat datorsystem, t.ex. en edge-dator, för att hantera inkommande data kan minska problemen med latens och möjliggöra kommunikation av information i realtid. För autonoma fordon integrerar dessa system avancerade grafiska processorenheter (GPU) från tillverkare som NVIDIA, som innehåller funktioner som Tensor Core och CUDA Cores för att förbättra prestandan.
AI-algoritmer
Användningen av algoritmer har alltid spelat en oumbärlig roll inom maskinseende. Dessa algoritmer gör det möjligt för datorer att urskilja och känna igen olika visuella element som mönster, konturer och nyanser som fångas av kameror. Genom att använda artificiell intelligens (AI) i stället för konventionella tekniker för maskinseende kan autonoma fordon avsevärt förbättra sin förmåga att exakt identifiera objekt, vägskyltar, körfältsmarkeringar och trafiksignaler. En rad olika AI-algoritmer används för närvarande för att utbilda självkörande bilar, varav några av de vanligaste är
YOLO, eller “You Only Look Once”, är en algoritm för objektdetektering i realtid som är utformad för att identifiera och spåra objekt inom en bils synfält.
Användningen av SIFT (Scale-Invariant Feature Transform) är avgörande för att extrahera egenskaper som gör det möjligt för ett fordon att identifiera viktiga landmärken och objekt i sin omgivande miljö.
Histograms of Orientated Gradients (HOG) är en allmänt använd teknik inom bildanalys, särskilt inriktad på identifiering av objekt baserat på utvinning av lokala mönster och gradientinformation som finns i visuella bilder.
TextonBoost är en beräkningsmodell som är utformad för att förbättra den visuella uppfattningen och förmågan att känna igen objekt genom att undersöka de intrikata texturmönstren i ett miljösammanhang. Detta innovativa tillvägagångssätt utnyttjar kraften i avancerade maskininlärningstekniker, såsom djupa neurala nätverk, för att analysera visuell information i flera skalor och över olika bildmodaliteter.Genom att utnyttja dessa banbrytande tekniker har TextonBoost potential att avsevärt förbättra vår förståelse för hur människor uppfattar och tolkar sin omgivning, vilket banar väg för nya genombrott inom forskningen om datorseende.
AdaBoost är en kraftfull algoritm som används för att förbättra noggrannheten i dataklassificeringen genom att integrera flera underpresterande klassificerare till en robust prediktiv modell som effektivt kan identifiera både objekt och potentiella faror i fordonets omgivande miljö.
Betydelsen av maskinseende i självkörande bilar
 Image Credit:Automobile Italia/ Flickr
Image Credit:Automobile Italia/ Flickr
Maskinseende är avgörande för att självkörande bilar ska kunna uppfatta sin omgivning, vilket gör det nödvändigt att underlätta driften av självkörande bilar på högre nivåer längs spektrumet av fordonsautonomi. Om denna förmåga saknas skulle dessa fordon förpassas till de lägre nivåerna av autonomi, vilket skulle hindra deras utveckling mot fullständig automatisering.
Tack vare framstegen inom maskinseende har autonoma fordon blivit skickliga på att klassificera objekt på vägen, upptäcka körfält och signaler, identifiera skyltar och känna igen mönster i trafikflödet.
Trots att de förlitar sig på en rad olika sensorsystem, inklusive LiDAR, RADAR och SONAR, för navigering och situationsmedvetenhet, är dagens autonoma fordon fortfarande starkt beroende av maskinseende för att uppfatta sin omgivning, urskilja objekt i den och förstå betydelsen av vägskyltar och trafiksignaler. Införlivandet av ytterligare sensoriska modaliteter tjänar endast till att förbättra kapaciteten hos maskinsyn och därigenom främja ökad säkerhet för fotgängare, tamdjur och egendom.
Maskinseende har utvecklats till en nivå där det kan fungera självständigt utan att behöva ytterligare stöd från andra sinnesintryck. Till exempel har Teslas senaste självkörande fordon eliminerat användningen av RADAR-teknik till förmån för att uteslutande förlita sig på maskinseende för att underlätta deras autopilotsystem.
Även om detta kanske inte undergräver fördelarna med alternativa sensoriska system i autonoma fordon, understryker det betydelsen och styrkan hos maskinseende inom området för självkörande bilar.
Framtiden för maskinseende i autonoma fordon
Maskinseende är en hörnsten i utvecklingen av självkörande bilar och gör det möjligt för dessa fordon att uppfatta sin omgivning med samma skärpa som mänskliga förare.Även om det fortfarande finns hinder som måste övervinnas, är det obestridligt att fördelarna med maskinseende i fråga om säkerhet och navigering är betydande. När vi blickar mot framtiden för autonoma transporter kommer fortsatta framsteg inom artificiell intelligens, edge computing och bildteknik utan tvekan att leda till ökad kompetens hos självkörande bilar, vilket resulterar i en höjning av deras autonominivå.