O que é a visão artificial e qual a sua importância para os automóveis autónomos?
Principais conclusões
Os veículos autónomos utilizam capacidades avançadas de perceção visual como forma de compreender o seu ambiente, permitindo-lhes discernir obstáculos, reconhecer sinalização e viajar em segurança ao longo das estradas através da utilização de tecnologias de visão artificial.
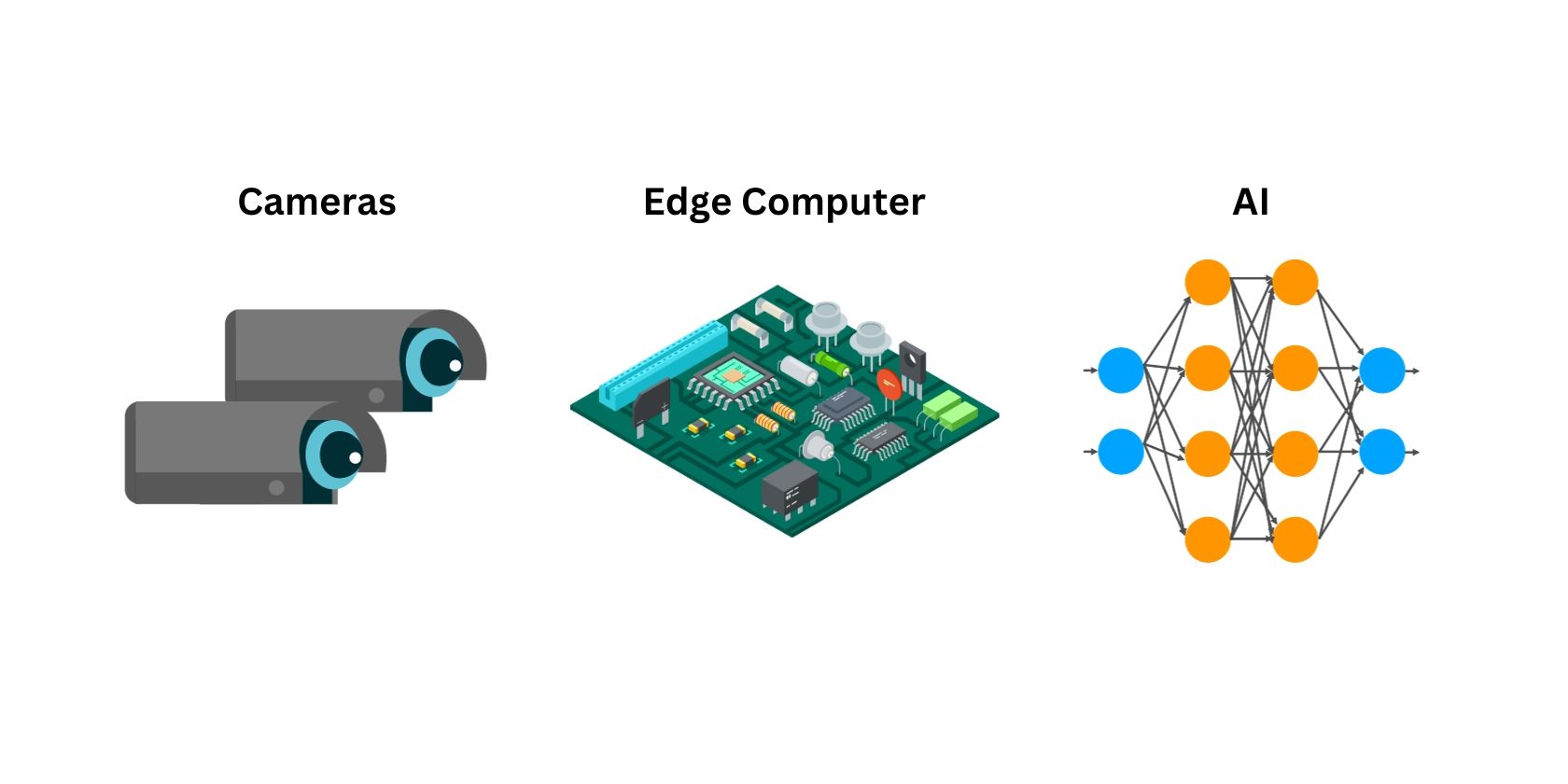
A visão artificial utilizada pelos veículos autónomos emprega uma combinação de câmaras, computação de ponta e técnicas de inteligência artificial para adquirir dados visuais, analisá-los instantaneamente e reconhecer formas e entidades no ambiente.
Os avanços na inteligência artificial, na computação periférica e na tecnologia de câmaras são essenciais para alcançar a autonomia total nos veículos autónomos através da visão artificial. Esta capacidade permite a classificação de objectos, a deteção de faixas de rodagem e sinais, a identificação de sinais e o reconhecimento de padrões de tráfego.
O conceito de veículos autónomos tem suscitado um interesse considerável ao longo do tempo. Apesar de atualmente não possuirmos automóveis totalmente autónomos, os veículos modernos estão equipados com sistemas avançados de assistência ao condutor (ADAS), que podem executar funções como direção automática, correção do desvio da faixa de rodagem, operações de estacionamento e regulação adaptativa da velocidade em resposta às condições de tráfego prevalecentes.
Um veículo de condução autónoma depende de uma multiplicidade de sensores para funcionar eficazmente como um Sistema Avançado de Assistência ao Condutor (ADAS). A visão artificial é o método predominante para percecionar, reconhecer e determinar a posição e o contexto de vários elementos no ambiente. A ausência de visão artificial tornaria altamente improvável a existência de veículos autónomos equipados apenas com controlo de velocidade de cruzeiro e piloto automático.
O que é a visão artificial?

A visão artificial, também conhecida como processamento de imagens com inteligência artificial, refere-se à capacidade das máquinas de interpretarem informações visuais do ambiente que as rodeia, reconhecendo e identificando objectos ou padrões específicos. Esta tecnologia tem inúmeras aplicações industriais para utilização em sistemas de automação, como robótica e veículos autónomos, onde permite que estas máquinas percebam e naveguem nos seus ambientes através de algoritmos informáticos concebidos para imitar a visão humana.
O estado atual da visão artificial assenta fortemente em técnicas de inteligência artificial, particularmente as derivadas de arquitecturas de aprendizagem profunda como as redes neuronais convolucionais (CNN). Estes algoritmos avançados permitem o desenvolvimento de modelos altamente resilientes e universalmente aplicáveis, capazes de discernir objectos com grande precisão numa vasta gama de cenários operacionais.Como resultado, estes sistemas estão a ser cada vez mais utilizados para aplicações de alto risco em indústrias que vão desde a produção e agricultura à robótica e veículos autónomos, onde o desempenho fiável é fundamental.
Como funciona a visão artificial nos automóveis autónomos?
a disposição da câmara, o processamento computacional (que tem lugar na extremidade) e os algoritmos de inteligência artificial. Estes elementos facilitam o funcionamento de um automóvel autónomo, permitindo-lhe perceber o que o rodeia, tomar decisões informadas com base nessa informação e distinguir entre vários objectos e potenciais perigos presentes ao longo do seu percurso. Para compreender a forma como estes aspectos tecnológicos se fundem para criar um sistema de visão artificial coeso para um automóvel autónomo, vamos analisar cada componente em pormenor.
Sistema de câmaras
A visão artificial utiliza sistemas de câmaras para adquirir dados visuais relativos ao ambiente circundante. Os veículos autónomos utilizam várias câmaras situadas à volta do veículo para acumular uma quantidade abrangente de informações visuais para melhorar a consciência situacional e a tomada de decisões.
Semicondutor Complementar de Óxido Metálico (CMOS) e Dispositivo de Carga Acoplada (CCD). No contexto dos veículos autónomos, o CMOS é frequentemente preferido devido à sua rápida velocidade de leitura, à robusta eletrónica de bordo e às capacidades de processamento paralelo, que o tornam uma opção mais expedita, apesar de ser suscetível a ruído ou distorções. No entanto, podem ser utilizadas várias estratégias para atenuar estes problemas, incluindo definições de iluminação ajustáveis, imagens digitais nocturnas e técnicas de filtragem de imagens que melhoram o desempenho do sensor CMOS em cenários de iluminação insuficiente.
A visão estereoscópica, que resulta da combinação de múltiplas entradas visuais, transmite uma perceção de profundidade ou tridimensionalidade aos objectos e ao ambiente circundante. Para que isto seja possível nos veículos autónomos, as câmaras são estrategicamente posicionadas em intervalos específicos, permitindo-lhes calcular a distância próxima entre um objeto e o veículo através da trilateração.
A estereopsia, ou seja, a capacidade de percecionar a profundidade através da visão binocular, é uma vantagem valiosa que os seres humanos têm devido ao facto de possuírem dois olhos. Este fenómeno pode ser verificado experimentalmente fechando um olho e seleccionando um objeto minúsculo situado no espaço de trabalho. Posicionando a mão ao longo da periferia do objeto e assegurando-se de que a sua extremidade não se encontra a menos de 5 cm de distância, o indivíduo pode tentar estimar a distância mantendo o olhar fixo durante alguns instantes.Posteriormente, a reabertura de ambos os olhos revelará uma capacidade notavelmente maior de apreender relações espaciais, um resultado atribuível à acuidade visual estereoscópica melhorada assim obtida.
Computador de borda
O computador de bordo, utilizando capacidades de processamento de borda, actualiza instantaneamente o sistema do veículo autónomo com informações em tempo real recolhidas pelo sistema de câmaras. Apesar das potenciais poupanças de custos associadas à computação em nuvem para aplicações padrão de visão artificial, os riscos inerentes envolvidos na ligação dos veículos autónomos à Internet exigem soluções alternativas.
A utilização de um sistema de computação distribuída, como um computador de ponta, para tratar os dados recebidos pode atenuar os problemas de latência e permitir a comunicação de informações em tempo real. Para veículos autónomos, estes sistemas integram unidades de processamento gráfico (GPU) avançadas de fabricantes como a NVIDIA, que incorporam funcionalidades como Tensor Core e CUDA Cores para melhorar o desempenho.
Algoritmos de IA
A utilização de algoritmos tem desempenhado um papel indispensável no domínio da visão artificial. Estes algoritmos permitem aos computadores discernir e reconhecer vários elementos visuais, como padrões, contornos e matizes, captados pelas câmaras. Ao empregarem a inteligência artificial (IA) em vez de se basearem em técnicas convencionais de visão artificial, os veículos autónomos podem melhorar significativamente a sua capacidade de identificar com precisão objectos, sinais de trânsito, marcas de faixa de rodagem e sinais de trânsito. Atualmente, está a ser utilizada uma série de algoritmos de IA para educar os veículos autónomos, sendo que alguns dos mais comuns incluem:
YOLO, ou “You Only Look Once”, é um algoritmo de deteção de objectos em tempo real concebido para identificar e seguir objectos dentro do alcance visual de um automóvel.
A utilização da Transformada de Características Invariantes de Escala (SIFT) é crucial para extrair características que permitam a um veículo identificar pontos de referência e objectos salientes no seu ambiente circundante.
A utilização de Histogramas de Gradientes Orientados (HOG) é uma técnica amplamente utilizada no domínio da análise de imagens, especificamente orientada para a identificação de objectos com base na extração de padrões locais e informações de gradiente presentes em imagens visuais.
TextonBoost é um modelo computacional concebido para melhorar a perceção visual e melhorar as capacidades de reconhecimento de objectos, examinando os padrões intrincados da textura num contexto ambiental. Esta abordagem inovadora aproveita o poder das técnicas avançadas de aprendizagem automática, como as redes neurais profundas, para analisar a informação visual a várias escalas e em várias modalidades de imagem.Ao tirar partido destas tecnologias de ponta, o TextonBoost tem o potencial de fazer avançar significativamente a nossa compreensão da forma como os humanos percepcionam e interpretam o que os rodeia, abrindo caminho para novos avanços na investigação da visão computacional.
O AdaBoost é um poderoso algoritmo utilizado para aumentar a precisão da classificação de dados, integrando vários classificadores de baixo desempenho num modelo preditivo robusto capaz de identificar eficazmente objectos e potenciais perigos no ambiente circundante do veículo.
A importância da visão artificial nos automóveis autónomos
 Crédito da imagem: Automobile Italia/ Flickr
Crédito da imagem: Automobile Italia/ Flickr
A dependência da visão artificial é crucial para permitir que os veículos autónomos percebam o seu ambiente, tornando-a indispensável para facilitar o funcionamento dos automóveis autónomos a níveis mais elevados ao longo do espetro da autonomia dos veículos. A ausência desta capacidade faria com que estes veículos fossem relegados para os escalões inferiores de autonomia, impedindo a sua progressão para a automatização completa.
Graças aos avanços na tecnologia de visão artificial, os veículos autónomos tornaram-se competentes na classificação de objectos na estrada, na deteção de faixas de rodagem e sinais, na identificação de sinais e no reconhecimento de padrões no fluxo de tráfego.
Apesar de dependerem de uma série de sistemas de sensores, incluindo LiDAR, RADAR e SONAR, para navegação e consciência situacional, os veículos autónomos contemporâneos ainda dependem fortemente da visão artificial para perceberem o que os rodeia, discernirem objectos dentro deles e compreenderem o significado da sinalização na estrada e dos sinais de trânsito. A incorporação de modalidades sensoriais adicionais serve apenas para melhorar as capacidades da visão artificial e, assim, promover uma maior segurança para os peões, animais domésticos e bens.
É certo que a visão artificial evoluiu para um nível em que é capaz de funcionar de forma autónoma sem necessitar de apoio adicional de outras entradas sensoriais. Por exemplo, os veículos de condução autónoma mais recentes da Tesla eliminaram a utilização da tecnologia RADAR em favor de confiarem exclusivamente na visão artificial para facilitar os seus sistemas de piloto automático.
Embora isto possa não prejudicar o mérito de sistemas sensoriais alternativos em veículos autónomos, sublinha a importância e a potência da visão artificial no domínio dos automóveis autónomos.
O futuro da visão artificial em veículos autónomos
A visão artificial serve como pedra angular para o desenvolvimento de automóveis autónomos, permitindo que estes veículos percebam o que os rodeia com um grau de acuidade igual ao dos condutores humanos.Embora ainda existam obstáculos que têm de ser ultrapassados, é indiscutível que as vantagens proporcionadas pela visão artificial em questões de segurança e navegação são substanciais. Ao olharmos para o futuro do transporte autónomo, o progresso contínuo da inteligência artificial, da computação de ponta e das tecnologias de imagem conduzirá, sem dúvida, a uma maior competência por parte dos automóveis autónomos, resultando numa elevação do seu nível de autonomia.