CAN(컨트롤러 영역 네트워크) 버스는 다양한 산업, 자동차 및 항공 우주 애플리케이션에서 널리 사용되는 견고하고 안정적인 통신 프로토콜입니다. CAN 버스 네트워크를 통해 마이크로컨트롤러와 장치 간에 데이터를 전송하기 위해 설계되었습니다. 아직 잘 모르실 수도 있지만, 소셜 미디어에서 볼 수 있는 멋진 자동차 대시보드 모드의 배후에 있는 기술입니다.
Arduino와 브레드보드를 사용하여 MCP2515 CAN 모듈로 CAN 버스를 구축하는 방법을 안내합니다. 또한 Arduino CAN 라이브러리를 살펴보고 CAN 버스를 통해 데이터를 송수신하는 방법을 시연합니다.
CAN 버스란 무엇인가요?
CAN 버스는 1980년대에 보쉬에서 개발한 직렬 통신 프로토콜입니다. 높은 신뢰성과 견고성으로 인해 다양한 애플리케이션에서 널리 사용되고 있습니다. 단 두 개의 회선을 통해 최소한의 지연 시간으로 장치 간 데이터를 고속으로 전송할 수 있습니다: CAN High와 CAN Low.
1994년 CAN 버스는 자동차 애플리케이션에서 전자 컨트롤러 간의 빠른 직렬 데이터 교환을 위해 특별히 설계된 국제 표준(ISO 11898)이 되었습니다. CAN 버스가 무엇이며 자동차 시스템에서 어떤 역할을 하는지에 대한 자세한 내용은 종합 가이드를 참조하세요.
CAN 버스가 인기 있는 이유 중 하나는 오류 감지 및 수정 기능 때문입니다. 이 프로토콜은 데이터 전송 시 오류를 감지하고 수정할 수 있습니다. 따라서 산업 자동화와 같이 데이터 무결성이 중요한 애플리케이션에 이상적입니다.
MCP2515 CAN 모듈 알아보기
MCP2515 CAN 버스 컨트롤러 모듈은 널리 사용되는 CAN 프로토콜 버전 2.0B에 대한 탁월한 지원을 제공하는 장치입니다. 이 모듈은 최대 1Mbps의 높은 데이터 속도로 통신하는 데 이상적입니다.
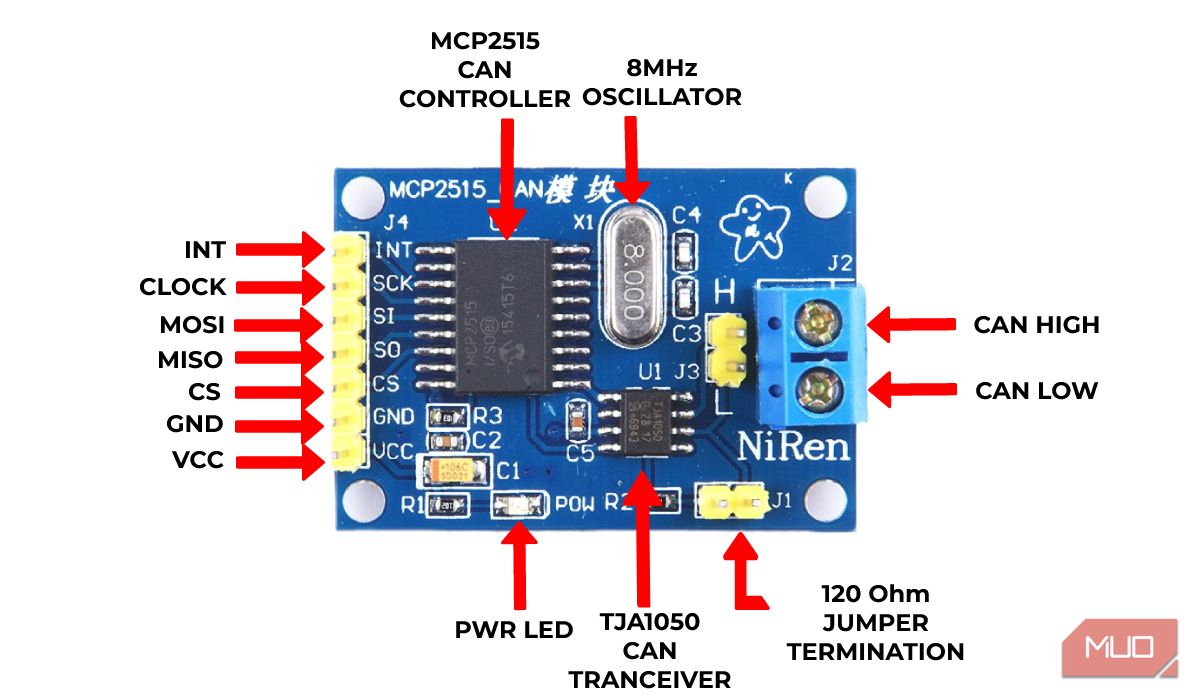
MCP2515 IC는 다양한 마이크로컨트롤러와 통신할 수 있는 SPI 인터페이스를 갖춘 독립적인 CAN 컨트롤러입니다. 반면에 TJA1050 IC는 MCP2515 CAN 컨트롤러 IC와 물리적 CAN 버스 사이의 인터페이스 역할을 합니다.
편의를 위해 120옴 종단을 연결할 수 있는 점퍼가 있어 다른 CAN 모듈과의 통신을 위해 CAN_H & CAN_L 나사에 전선을 더욱 쉽게 연결할 수 있습니다.
|
특징 |
사양 |
|---|---|
|
트랜시버 |
TJA1050 |
|
마이크로 컨트롤러 인터페이스 |
SPI(멀티 CAN 버스 통합 가능) |
|
수정 발진기 |
8MHz |
|
종단 |
120Ω |
|
속도 |
1Mbps |
|
전력 소비 |
저- 현재 대기 작동 |
|
치수 |
40 x 28mm |
|
노드 용량 |
최대 112개 노드 지원 |
고급 프로젝트에 이 모듈이 필요한 경우 MCP2515 데이터시트 에서 추가 정보를 얻을 수 있습니다.
CAN 메시지 구조
CAN 메시지 구조는 여러 세그먼트로 구성되지만, 이 프로젝트에서 가장 중요한 세그먼트는 식별자 및 데이터입니다. 식별자는 CAN ID 또는 PGN(파라미터 그룹 번호)이라고도 하며 CAN 네트워크에서 장치를 식별하고, 식별자의 길이는 사용되는 CAN 프로토콜 유형에 따라 11비트 또는 29비트가 될 수 있습니다.
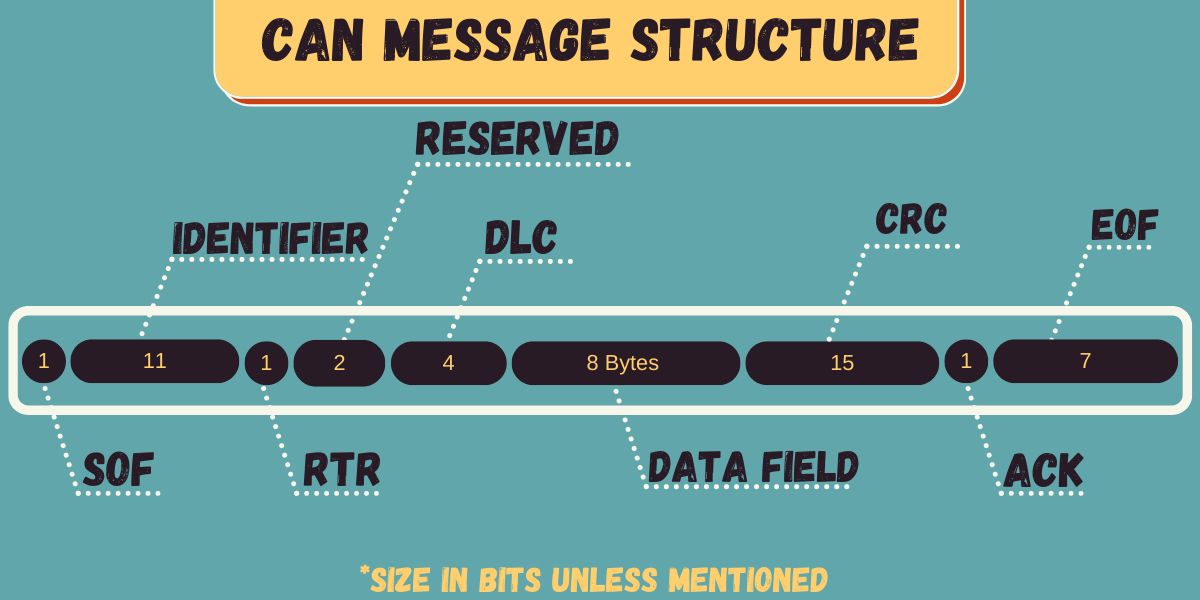
한편, 데이터는 전송되는 실제 센서/제어 데이터를 나타냅니다. 데이터의 길이는 0바이트에서 8바이트까지 가능하며, 데이터 길이 코드(DLC)는 존재하는 데이터 바이트 수를 나타냅니다.
아두이노 MCP2515 CAN 버스 라이브러리
이 라이브러리는 최대 1Mbps의 속도로 작동할 수 있는 CAN V2.0B 프로토콜을 구현합니다. 이 라이브러리는 표준(11비트) 및 확장(29비트) 데이터를 모두 지원하면서 최대 10MHz의 속도로 작동할 수 있는 SPI 인터페이스를 제공합니다. 또한 두 개의 수신 버퍼가 제공되어 우선 순위가 지정된 메시지를 저장할 수 있습니다.
CAN 버스 초기화
다음은 CAN 버스를 초기화하는 데 필요한 설정 코드입니다:
#include <SPI.h>
#include <mcp2515.h>
MCP2515 mcp2515(10); // Set CS pin
void setup() {
while (!Serial);
Serial.begin(9600);
SPI.begin(); //Begins SPI communication
mcp2515.reset();
mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
}
이것은 MCP2515를 500Kbps의 CAN 비트 전송률과 8MHz의 오실레이터 주파수로 초기화합니다.
MCP2515 CAN 작동 모드
MCP2515 CAN 버스 컨트롤러에 사용되는 작동 모드는 세 가지입니다:
⭐ setNormalMode(): 컨트롤러가 메시지를 송수신하도록 설정합니다.
⭐ setLoopbackMode(): 컨트롤러가 메시지를 송수신하도록 설정하지만, 보내는 메시지도 자체적으로 수신합니다.
⭐ setListenOnlyMode(): 컨트롤러가 메시지만 수신하도록 설정합니다.
MCP2515 CAN 버스 컨트롤러의 작동 모드를 설정하는 데 사용되는 함수 호출입니다.
mcp2515.setNormalMode();
mcp2515.setLoopbackMode();
mcp2515.
CAN 버스를 통해 데이터 전송
CAN 버스를 통해 메시지를 전송하려면 sendMsgBuf() 메서드를 사용합니다:
unsigned char data[] = {0x01, 0x02, 0x03, 0x04};
CAN.sendMsgBuf(0x01, 0, 4, data);
이것은 ID 0x01과 데이터 페이로드 {0x01, 0x02, 0x03, 0x04}의 메시지를 전송합니다. 첫 번째 매개변수는 CAN ID, 두 번째는 메시지 우선순위, 세 번째는 데이터 페이로드의 길이, 네 번째는 데이터 페이로드 자체입니다.
sendMsgBuf() 메서드는 메시지가 성공적으로 전송되었는지 여부를 나타내는 값을 반환합니다. 이 값은 checkError() 메서드를 호출하여 확인할 수 있습니다:
if (CAN.checkError()) {
Serial.println("Error sending message.");
}
메시지 전송 중에 오류가 발생했는지 확인하고 필요한 경우 오류 메시지를 인쇄합니다.
CAN 버스에서 데이터 수신
CAN 버스를 통해 메시지를 수신하려면 readMsgBuf() 메서드를 사용할 수 있습니다:
unsigned char len = 0;
unsigned char buf[8];
unsigned char canID = 0;
if (CAN.checkReceive()) {
CAN.readMsgBuf(&len, buf);
canID = CAN.getCanId();
}
이 메서드는 CAN 버스에서 메시지를 사용할 수 있는지 확인한 다음 메시지를 buf 배열로 읽습니다. 메시지의 길이는 len 변수에 저장되고, 메시지의 ID는 canID 변수에 저장됩니다.
메시지를 수신하면 필요에 따라 데이터 페이로드를 처리할 수 있습니다. 예를 들어, 데이터 페이로드를 직렬 모니터에 인쇄할 수 있습니다.
Serial.print("Received message with ID ");
Serial.print(canID, HEX);
Serial.print(" and data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
수신된 메시지의 ID와 데이터 페이로드를 직렬 모니터에 인쇄합니다.
CAN 버스 트랜시버를 브레드보드에 연결하는 방법
이 예제 프로젝트에서 두 장치를 연결하기 위한 CAN 버스를 빌드하려면 다음이 필요합니다:
⭐ 마이크로컨트롤러 2개(이 예제에서는 Arduino Nano 보드 2개)
⭐ MCP2515 CAN 모듈 2개
⭐ 브레드보드
⭐ 점퍼 와이어
⭐ I2C 16×2 LCD 스크린 모듈
⭐ HC-. SR04 초음파 센서
이 프로젝트 예제에서는, 아두이노 스케치에는 4개의 라이브러리가 사용됩니다. 초음파 센서에 사용하기 쉬운 인터페이스를 제공하는 NewPing 라이브러리와 아두이노 보드와 MCP2515 CAN 버스 컨트롤러 간의 통신을 용이하게 하는 SPI 라이브러리 이 있습니다. 디스플레이 모듈에는 LiquidCrystal_I2C 라이브러리가 사용됩니다.
마지막으로 MCP2515 칩과 인터페이스하기 위한 mcp2515 라이브러리 이 있어 CAN 버스 네트워크를 통해 데이터를 쉽게 전송할 수 있습니다.
하드웨어 설정(HC-SR04 예제)
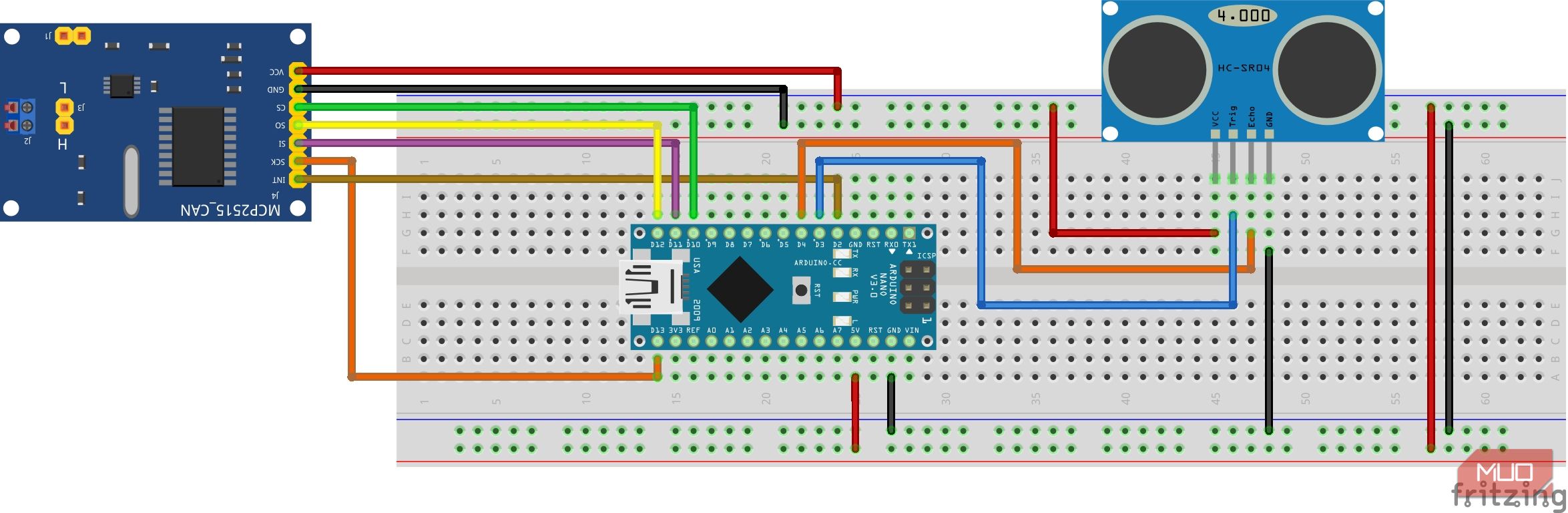
HC-SR04 센서와 LCD를 사용하는 이 프로젝트에서 하나의 아두이노 나노 보드는 수신기 역할을 하고, 다른 아두이노는 송신기 역할을 합니다. 아래 배선도에 따라 발신기 구성 요소를 연결합니다:
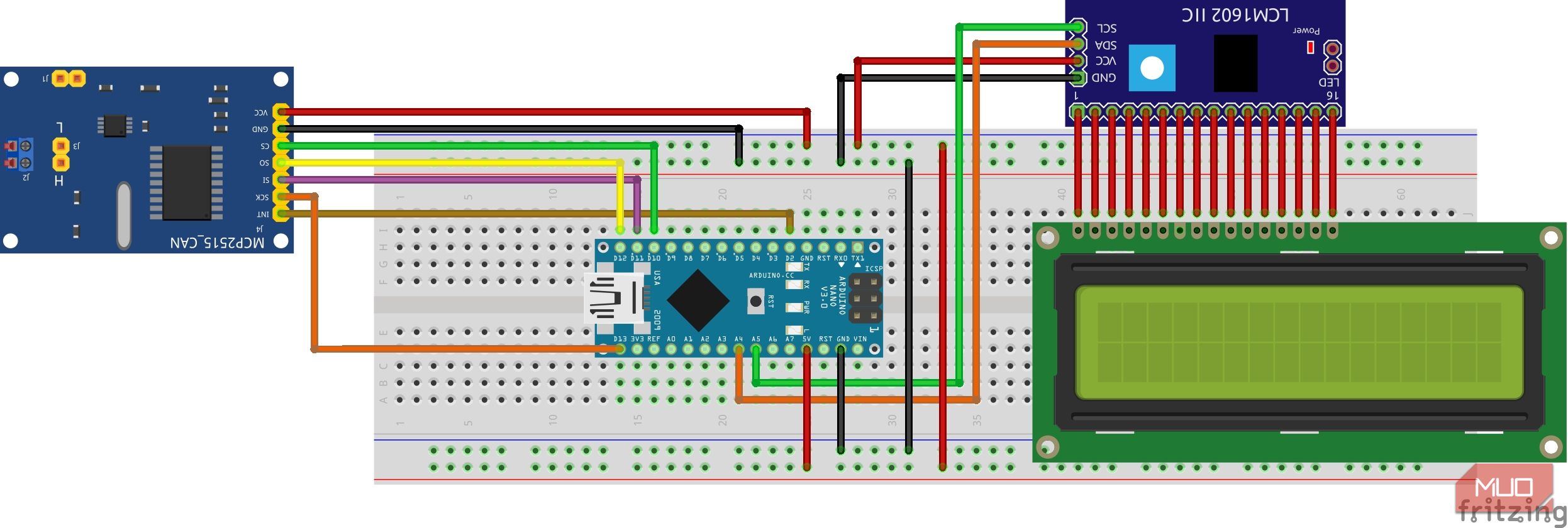
다음은 수신기 회로 다이어그램입니다:
마지막으로 그림과 같이 CAN_H 및 CAN_L 라인을 사용하여 두 노드를 함께 연결합니다:
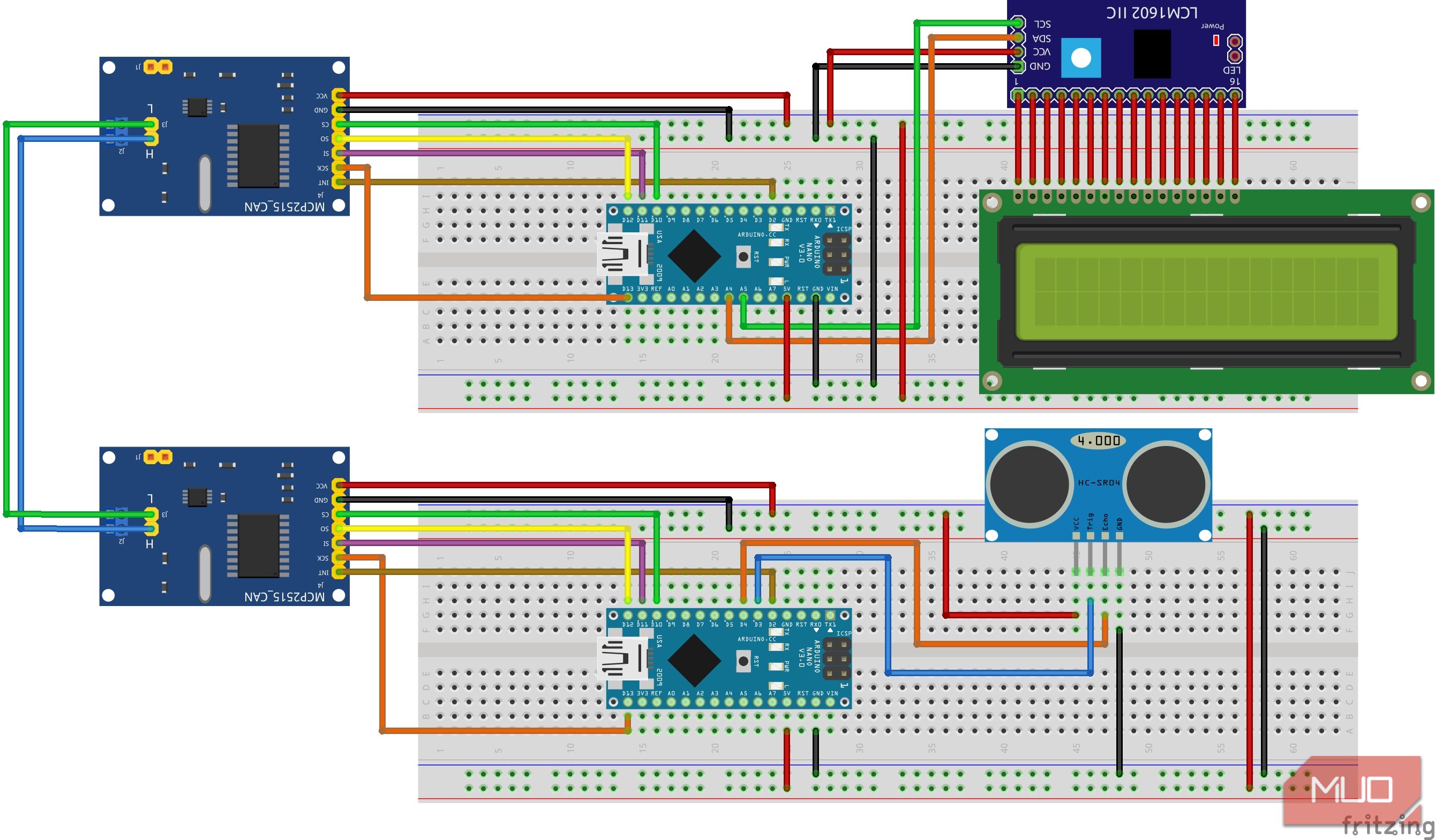
모듈을 연결할 때 전원 공급 장치 전압이 지정된 범위 내에 있는지, CAN H 및 CAN L 핀이 버스에 올바르게 연결되어 있는지 확인하는 것이 중요합니다.
MCP2515 CAN 버스 모듈 프로그래밍
MCP2515 모듈을 프로그래밍할 때는 네트워크의 다른 CAN 장치와 성공적으로 통신할 수 있도록 올바른 비트 전송률을 사용하는 것이 중요합니다.
발신자 코드:
#include <MCP2515.h>
#include <SPI.h>
#include <NewPing.h>
MCP2515 mcp2515(10);
const byte trigPin = 3;
const byte echoPin = 4;
NewPing sonar(trigPin, echoPin, 200);
struct can_frame canMsg;
void setup() {
Serial.begin(9600);
mcp2515.reset();
mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
}
void loop() {
unsigned int distance = sonar.ping_cm();
canMsg.can_id = 0x036; //CAN id as 0x036
canMsg.can_dlc = 8; //CAN data length as 8
canMsg.data[0] = distance; //Update humidity value in [0]
canMsg.data[1] = 0x00; //Rest all with 0
canMsg.data[2] = 0x00;
canMsg.data[3] = 0x00;
canMsg.data[4] = 0x00;
canMsg.data[5] = 0x00;
canMsg.data[6] = 0x00;
canMsg.data[7] = 0x00;
mcp2515.sendMessage(&canMsg);//Sends the CAN message
delay(100);
}
수신자 코드:
#include <mcp2515.h>
#include <SPI.h>
#include <LiquidCrystal_I2C.h>
MCP2515 mcp2515(10);
LiquidCrystal_I2C lcd(0x27,16,2);
struct can_frame canMsg;
void setup() {
Serial.begin(9600);
mcp2515.reset();
mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
lcd.init();
lcd.backlight();
lcd.setCursor(0, 0);
lcd.print("All Things N CAN TUTORIAL");
delay(3000);
lcd.clear();
}
void loop() {
if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) // To receive data
{
int distance = canMsg.data[0];
lcd.setCursor(0,0);
lcd.print("Distance: ");
lcd.print(distance);
lcd.print("cm ");
}
}
아두이노 프로젝트를 한 단계 업그레이드
CAN 버스와 아두이노의 결합은 다양한 애플리케이션에서 사용되는 정교한 통신 네트워크를 구축하거나 학습할 수 있는 강력한 플랫폼을 제공합니다. 가파른 학습 곡선처럼 보일 수 있지만 브레드보드에 직접 설정하는 것은 복잡한 DIY 프로젝트에서 CAN 버스 네트워크를 사용하는 방법을 배우는 데 매우 편리한 방법입니다.